Bordcomputer
Zur Verarbeitung der Positions- und Sensordaten verwenden wir ein FEZ Panda II Entwicklerboard mit ARM-CPU. Der Mikrocontroller ist ein USBizi mit .NET Micro Framework 4.1. Er lässt sich damit recht komfortabel programmieren, da für die diversen Schnittstellen passende Libraries mitgeliefert werden.

FEZ Panda II CPU Board
Features:
- NXP LPC2387ARM MCU (ARM7 72 MHz)
- 512 KB Programmspeicher (148 KB nutzbar)
- 96 KB RAM (64 KB nutzbar)
- max. 54 digitale I/O (GPIO)
- 4 serielle Schnittstellen
- I2C
- SPI
- 6 analoge Inputs (ADC)
- microSD-Slot
- USB-Schnittstelle
Einsätze: M3-002, M3-003, M3-004, M3-005
Daughter-Boards
Zum Anschluss der Stromversorgung und der Messinstrumente haben wir verschiedene Daughter-Boards entwickelt, die auf das FEZ Panda II gesteckt werden. Die Stromversorgung übernimmt ein externer 7.4V-Akku.
Version 1
Das erste Daughter-Board wurde auf einer Lochrasterplatine aufgebaut. Es hat Anschlüsse für analoge Temperaturfühler, einen analogen Drucksensor, ein GPS-Modul, die Linksprite-Kamera und ein XBee-Modul.
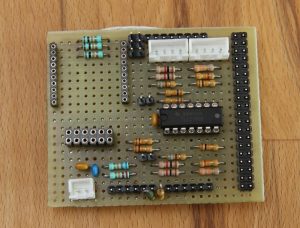
FEZ Panda II Daughter-Board v1
Version 2
Eine verbesserte Version des Daughter-Boards wurde auf einer geätzten Platine aufgebaut. Der analoge Drucksensor wurde eliminiert, dafür können nun ein Bewegungssensor und Barometer angeschlossen werden.
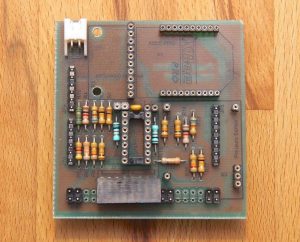
FEZ Panda II Daughter-Board v2